詳細については、 Data types リファレンス を参照してください。
さらに詳しく知りたい場合は、 モデルの予測を可視化するデモレポート を確認するか、 動画ガイド をご覧ください。
事前準備
W&B SDK でメディアオブジェクトをログに記録するには、追加の依存関係をインストールする必要がある場合があります。 次のコマンドを実行して、これらの依存関係をインストールできます。画像
画像をログに記録して、入力、出力、フィルタの重み、アクティベーションなどを追跡します。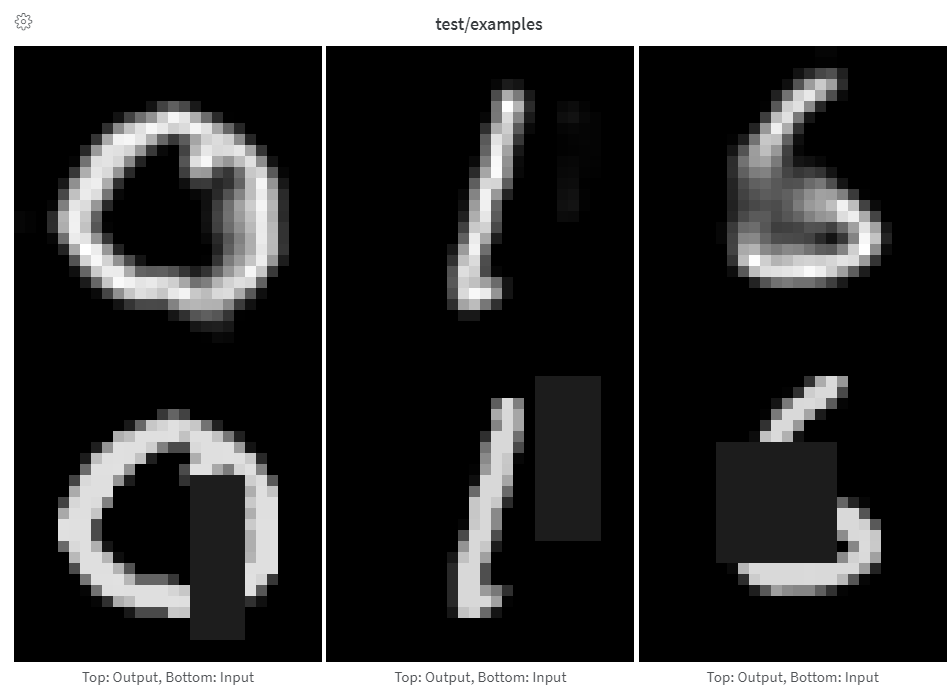
ログの記録がトレーニングのボトルネックになったり、結果を表示する際の画像の読み込みがボトルネックになったりするのを防ぐため、1ステップあたり50枚未満の画像をログに記録することをお勧めします。
- 配列を画像としてログ記録する
- PIL 画像のログ記録
- ファイルから画像をログ記録する
torchvision の make_grid を使用するなど、手動で画像を構築する際に配列を直接提供します。配列は Pillow を使用して png に変換されます。0 から 255 の間の整数に変換されます。画像の正規化を別の方法で行いたい場合は、手動で mode を指定するか、このパネルの「PIL 画像のログ記録」タブで説明されているように PIL.Image を提供してください。画像オーバーレイ
- セマンティックセグメンテーションマスク
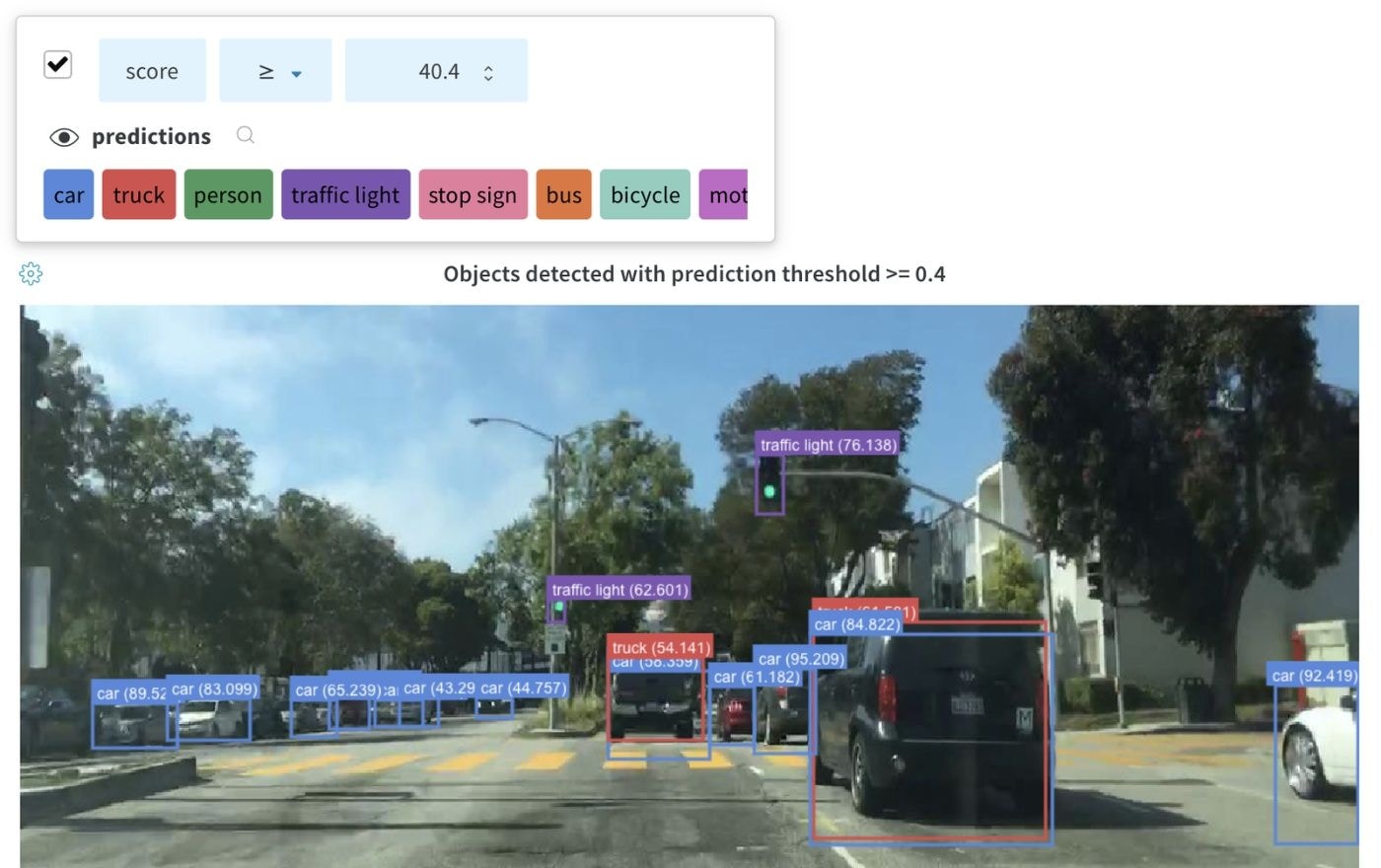
- バウンディングボックス
セマンティックセグメンテーションマスクをログに記録し、 W&B UI を通じて、不透明度の変更や時間経過による変化の表示などの操作を行うことができます。
wandb.Image の masks キーワード引数に、以下のキーと値を持つ辞書を提供します。- 画像マスクを表す2つのキーのいずれか:
"mask_data": 各ピクセルの整数のクラスラベルを含む 2D NumPy 配列"path": (文字列) 保存された画像マスクファイルへのパス
"class_labels": (オプション) 画像マスク内の整数のクラスラベルを読み取り可能なクラス名にマッピングする辞書
run.log() の各呼び出し)で定義されます。- ステップで同じマスクキーに対して異なる値が提供された場合、そのキーの最新の値のみが画像に適用されます。
- ステップで異なるマスクキーが提供された場合、各キーのすべての値が表示されますが、表示されているステップで定義されているものだけが画像に適用されます。ステップで定義されていないマスクの表示を切り替えても、画像は変化しません。
テーブル内の画像オーバーレイ
- セマンティックセグメンテーションマスク
- バウンディングボックス
wandb.Image オブジェクトを提供する必要があります。例を以下のコードスニペットに示します。
ヒストグラム
- 基本的なヒストグラムのログ記録
- 柔軟なヒストグラムのログ記録
リスト、配列、テンソルなどの数値のシーケンスが最初の引数として提供された場合、 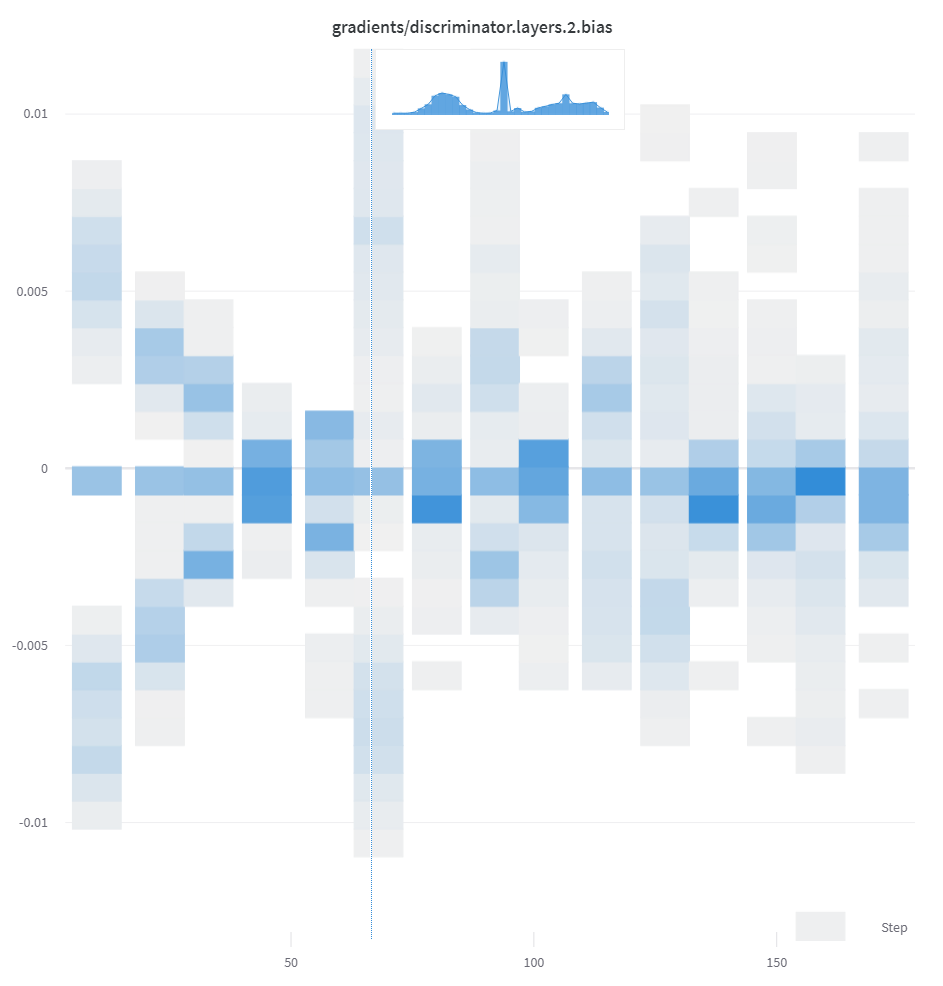
np.histogram を呼び出してヒストグラムを自動的に構築します。すべての配列/テンソルはフラット化されます。オプションの num_bins キーワード引数を使用して、デフォルトの 64 ビンをオーバーライドできます。サポートされている最大ビン数は 512 です。UI では、トレーニング全体でログに記録されたヒストグラムの比較を容易にするため、x 軸にトレーニングステップ、y 軸にメトリック値、色でカウントを表したヒストグラムがプロットされます。1回限りのヒストグラムのログ記録の詳細については、このパネルの「サマリー内のヒストグラム」タブを参照してください。3D 可視化
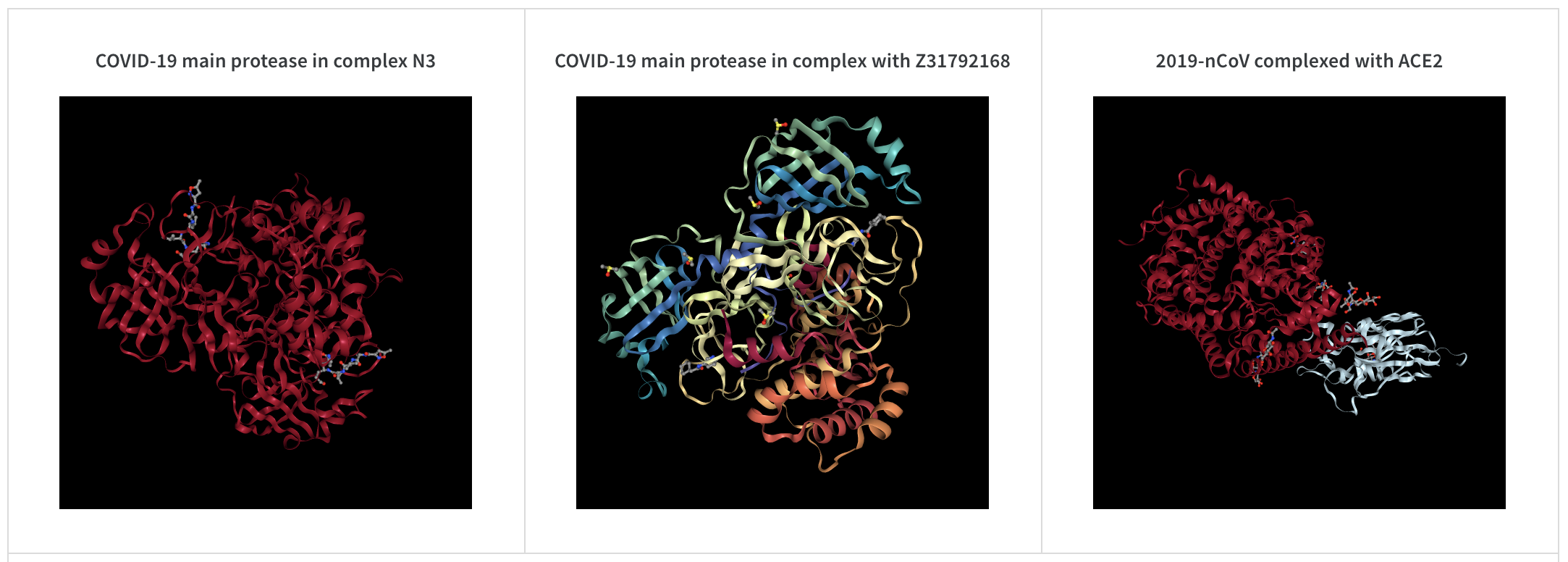
3D ポイントクラウドやバウンディングボックス付きのリダー(Lidar)シーンをログに記録します。レンダリングするポイントの座標と色を含む NumPy 配列を渡します。W&B UI は、300,000 ポイントでデータを切り捨てます。
NumPy 配列の形式
柔軟なカラースキームのために、3つの異なる NumPy 配列形式がサポートされています。[[x, y, z], ...]nx3[[x, y, z, c], ...]nx4| c はカテゴリで[1, 14]の範囲(セグメンテーションに便利)[[x, y, z, r, g, b], ...]nx6 | r,g,bは、赤、緑、青のカラーチャンネルの[0,255]の範囲の値。
Python オブジェクト
このスキーマを使用して Python オブジェクトを定義し、それをfrom_point_cloud メソッド に渡すことができます。
pointsは、上記で示した単純なポイントクラウドレンダラーと同じ形式を使用して、レンダリングするポイントの座標と色を含む NumPy 配列です。boxesは、3つの属性を持つ Python 辞書の NumPy 配列です。corners- 8つのコーナーのリストlabel- ボックス上にレンダリングされるラベルを表す文字列(オプション)color- ボックスの色を表す RGB 値score- バウンディングボックス上に表示される数値。表示されるボックスをフィルタリングするために使用できます(例:score>0.75のボックスのみ表示)。(オプション)
typeはレンダリングするシーンタイプを表す文字列です。現在サポートされている値はlidar/betaのみです。
ポイントクラウドファイル
from_file メソッド を使用して、ポイントクラウドデータが入った JSON ファイルを読み込むことができます。
NumPy 配列
上で定義したのと同じ配列形式を使用して、numpy 配列を from_numpy メソッド で直接使用してポイントクラウドを定義できます。
pdb 、 pqr 、 mmcif 、 mcif 、 cif 、 sdf 、 sd 、 gro 、 mol2 、 mmtf の10種類のファイルタイプのいずれかでログに記録します。
W&B は、 SMILES 文字列、 rdkit の mol ファイル、および rdkit.Chem.rdchem.Mol オブジェクトからの分子データのログ記録もサポートしています。
PNG 画像
wandb.Image は、デフォルトで numpy 配列または PILImage のインスタンスを PNG に変換します。
動画
動画はwandb.Video データタイプを使用してログに記録されます。
分子の 2D ビュー
wandb.Image データタイプと rdkit を使用して、分子の 2D ビューをログに記録できます。
その他のメディア
W&B は、他にもさまざまなメディアタイプのログ記録をサポートしています。音声
audio-file を参照してください。
動画
ffmpeg と moviepy Python ライブラリが必要です)。サポートされている形式は "gif" 、 "mp4" 、 "webm" 、 "ogg" です。 wandb.Video に文字列を渡すと、 wandb にアップロードする前にファイルが存在し、サポートされている形式であることを確認します。 BytesIO オブジェクトを渡すと、指定された形式を拡張子とする一時ファイルが作成されます。
W&B の Run ページと Project ページでは、メディアセクションに動画が表示されます。
詳細な使用方法については、 video-file を参照してください。
テキスト
wandb.Table を使用してテーブル内のテキストをログに記録し、 UI に表示させます。デフォルトの列ヘッダーは ["Input", "Output", "Expected"] です。 UI のパフォーマンスを最適化するため、デフォルトの最大行数は 10,000 行に設定されています。ただし、ユーザーは wandb.Table.MAX_ROWS = {DESIRED_MAX} を使用して明示的に最大値を上書きできます。
DataFrame オブジェクトを渡すこともできます。
string を参照してください。
HTML
inject=False を渡すことで、デフォルトのスタイルをオフにできます。
html-file を参照してください。